![[Term Project: Robot Arm Control using TCP/IP] 1. MG996R Servo Motor Specification](https://img1.daumcdn.net/thumb/R750x0/?scode=mtistory2&fname=https%3A%2F%2Fblog.kakaocdn.net%2Fdn%2FEvyIb%2FbtrgA6rC1D3%2FT3iNWy3XKBXzAeaEze8UH1%2Fimg.png)
MG996R - High Torque Metal Gear Dual Ball Bearing Servo
이번 포스팅에서는 MG996R 서보모터의 데이터시트를 분석하여 MG996R 서보 모터를 구동하는 법을 알아보겠다.
MG996R Specifications
구글링하여 얻을 수 있는 MG996R의 데이터시트를 첨부한다. 다른 전자부품의 데이터시트보단 내용이 현저히 부족하지만 기본적인 스펙 정도는 확인할 수 있다.
- 무게: 55g
- 사이즈: 40.7 x 19.7 x 42.9 mm
- 스톨 토크: 9.4 kgf·cm (4.8 V ), 11 kgf·cm (6 V)
- 동작 속도: 0.17 s/60º (4.8 V), 0.14 s/60º (6 V)
- 동작 전압: 4.8 V ~ 7.2 V
- 동작 전류: 500 mA – 900mA (6V)
- 스톨 전류: 2.5A (6V)
- Dead band width: 5 µs
- Stable and shock proof double ball bearing design
- 동작 온도: 0ºC ~ 55ºC
MG996R의 동작 전압은 4.8~7.2V이다. 높은 전압을 인가해줄수록 모터의 토크수가 증가한다.
여기서 주의해야할 점은 동작 전류가 0.5~0.9A이라는 것이다. 보통 Arduino, Raspberry Pi, STM Nucleo 등의 MCU Board에서 내보낼 수 있는 최대 전류가 제한되어 있다. 이 제한 전류는 0.5A보다 낮게 제한되어 있을 것이다! 따라서 MG996R의 전원은 MCU 보드에서 나오는 5V 전원이 아닌 외부 전원을 사용해야 한다.
MG996R Wiring
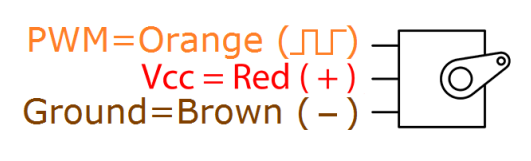
배선은 서보 모터의 연결선 색에 따라 위와 같이 하면 된다.
MG996R PWM Signal
MG996R 서보 모터를 구동시키려면 다음과 같은 PWM 신호가 필요하다.

위의 PWM 신호는 주기가 20ms(50Hz) 이고, 펄스 폭은 명시가 되어있지 않다. PWM 신호의 펄스 폭은 서보 모터의 각도를 제어하는 중요한 파라미터이다. 아래 사이트에 가보면 MG996R을 구동시키는 PWM 신호의 펄스 폭에 대한 정보가 있다.
MG996R Servo Motor Datasheet, Wiring Diagram & Features (components101.com)
MG996R Servo Motor
MG996R Servo Motor
components101.com
Duty Cycle(펄스 폭)은 1~2ms로 설정하면 된다고 한다. 즉, 서보 모터의 각도는 펄스 폭 1ms에서 0°, 펄스 폭 1.5ms에서 90°, 펄스 폭 2ms에서 180°가 된다.