![[Drone Firmware using STM32CubeIDE] 5. 드론 기체 조립](https://img1.daumcdn.net/thumb/R750x0/?scode=mtistory2&fname=https%3A%2F%2Fblog.kakaocdn.net%2Fdn%2FHFjhq%2FbtrbOJNomRw%2F8WALV7iwVtgTYeNtYeh7B0%2Fimg.jpg)
이제 드론의 기체를 조립해보자. 드론 프레임으로는 QAV210을 사용한다.
Connection between BLDC Motor & ESC
먼저 BLDC 모터의 선을 짧게 자른다. 자른 후의 선의 길이는 약 2.5cm로 한다. BLDC 모터를 잘 보면 색이 다른 것을 볼 수 있다. 검은색(Black) BLDC 모터는 시계(CW)방향 모터고, 은색(Silver) BLDC 모터는 반시계(CCW)방향 모터다. 기체를 조립할 때 모터의 방향을 주의하여 조립하여야 한다.


BLDC 모터의 선을 짧게 잘랐으면, 드론의 메인 프레임에 모터를 장착한다. 모터의 회전 방향에 유의하며 조립한다. 드론 기체 앞을 기준으로 프레임 뒷부분에 BLDC 모터를 고정할 나사 구멍이 있다. 이를 이용하여 모터를 고정시킨다. 사용한 나사 규격은 M3 규격이며 앞으로의 기체 조립에 사용할 나사 모두 M3 9mm 규격이다. 아래 사진에 모터마다 모터의 번호를 명시하였다. 이 모터 번호는 FC의 PWM 출력 핀에 연결할 때 각 모터를 구분하기 위하여 명시하였다.


이제 BLDC 모터와 ESC(BLHeli S Firmware)를 연결한다. 원할한 납땜 연결을 위해 ESC 납땜면에 납을 미리 묻혀준다.


다음과 같이 BLDC와 연결한다. 여기서 반시계(CCW) 방향 모터(Silver Cap)를 ESC와 연결할 때 주의해야한다. 반시계 방향 모터의 가운데 선은 ESC의 중앙에 연결하는것은 동일하지만 모터의 양 끝 선은 꼬아서 연결해야한다. 시계(CW) 방향 모터(Black Cap)는 곧바로 ESC와 연결한다. 다음 그림과 같이 연결하면 된다.
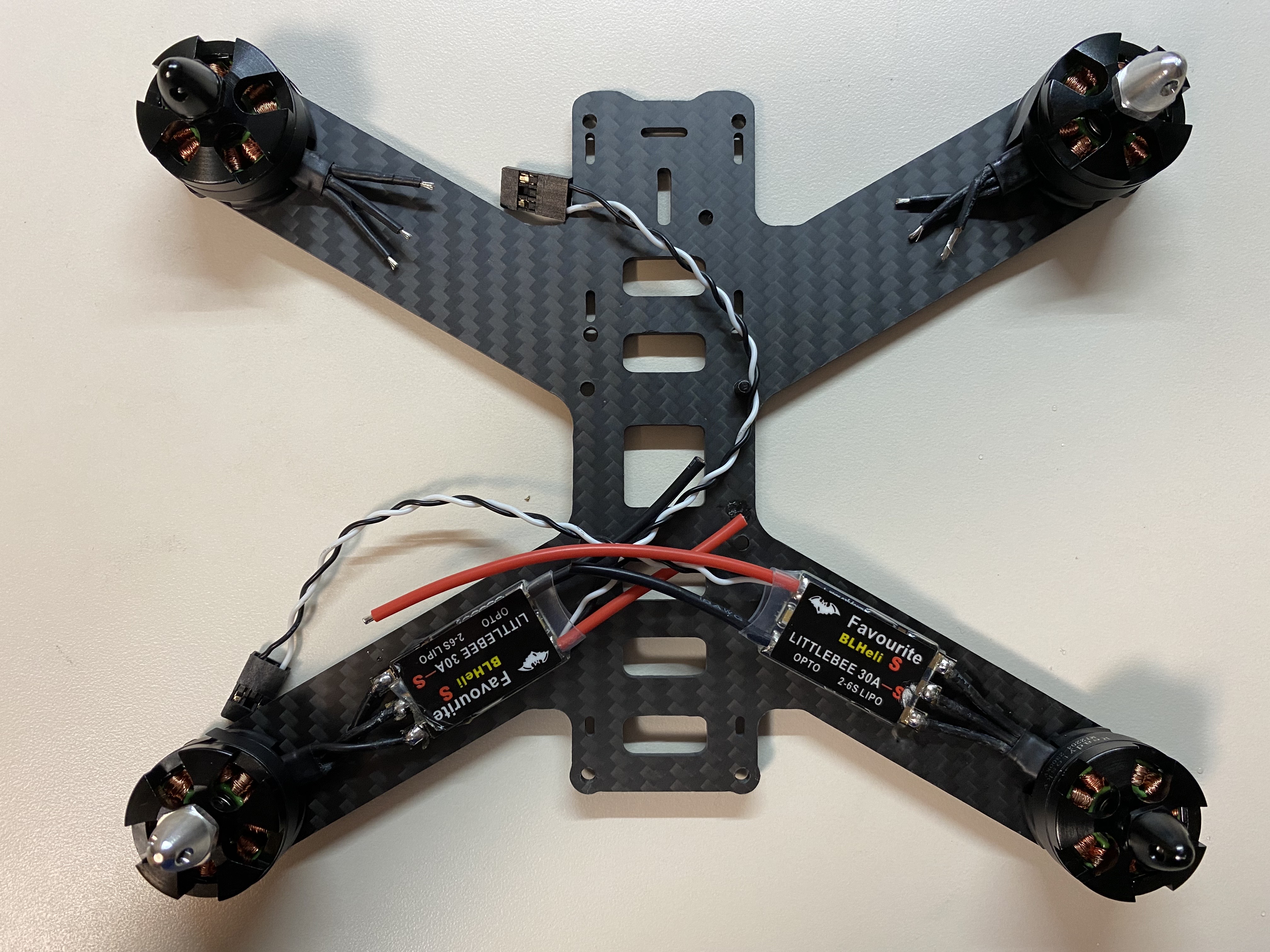


Connection BEC to ESC
그 다음으로 BEC에 ESC를 납땜 연결한다. 먼저 BEC를 아래 사진과 같은 방향으로 프레임 중앙에 위치하게 한다. 일단은 프레임 위에서 흔들리지만 않게 하기 위해서 구멍에 나사만 끠어 납땜시에 불편하지 않을정도로 적당히 고정시킨다. 그리고 ESC의 연결 선의 길이가 길으므로 적당하게 자른다. 선을 자를 때는 연결할 BEC의 납땜 면 위치에 맞게 자른다. 선을 적당량 자른 후, 납땜을 위해 전선의 피복을 살짝 벗긴다.



납땜 연결을 진행한다. BEC 납땜 면과 피복을 벗긴 전선에 납을 먼저 충분히 발라주면 선 연결이 수월하다. 특히 BEC의 (-)면에 납을 묻힐 때에는 충분한 열을 가한 후 납을 묻혀줘야한다. 그러지 않으면 납땜 면에 납이 제대로 붇지 않고 냉납현상이 나타날 수 있다. 선과 납땜 면에 묻은 납을 다시 녹여 연결하는 방식으로 진행한다. 이 때, 선이 뜨거워지므로 선을 잡을때는 핀셋을 이용하여 작업한다.



모두 연결하였으면 베터리를 넣어 문제없이 연결되었는지 확인한다. 이 때 퍽 소리와 함께 약간의 스파크가 튈 수 있다. 이는 BEC가 SMPS 방식이기 때문으로 합선으로 인한 스파크 현상은 아니므로 걱정하지 않아도 된다! (필자는 이 스파크 때문에 쇼트난 줄 알고 BEC를 새걸로 교체했다..) 전원 연결 시, BEC와 FC 각각 LED 2개에 불이 들어오면 정상적으로 연결되었다는 뜻이다.
문제 없이 연결되었음을 확인 했으면 FC를 프레임에 고정시켜보자. (BEC 위에 고정)
Fixation FC on frame
FC를 BEC위에 연결한다. 먼저 BEC위에 고무링을 올린다음, 그 위에 Anti-Vibration Mount로 고정시킨다. 이 고무링과 고무 마운트는 FC에 미세한 진동을 방지해주어서 센서값에 미세한 노이즈가 끼는 것을 막아준다.


그 위에 FC를 올린 후 PCB Mount로 고정시킨다. FC를 고무마운트 위에 고정시킬 때는 최대한 꽉 조여서 고정시킨다. 그리고 알루미늄 프레임 마운트 6개를 그림과 같이 고정하여 세운다.


Connection ESC to FC PWM Pin
이제 FC의 PWM 출력 핀에 ESC 신호선을 연결한다. 앞서 언급한 모터 번호에 맞게 연결한다. ESC 신호선은 검은색 선 GND와 흰색 선 PWM 입력으로 구성되어 있는데 이에 맞게 연결한다. 중앙의 +5V는 사용하지 않는다. 남는 핀을 이용하여 5V가 필요하다면 커넥터 오른쪽 아래에 납땜으로 연결할 수 있는 부분이 있다. 그 부분을 납을 이용하여 연결하면 가운데 핀에서 5V가 출력된다. 현재는 이 부분이 연결되지 않은 상태로 이 때는 5V가 출력되지 않고있는 상태이다.


연결된 모습이다. ESC 신호선은 잘라서 사용하기 어려우므로 알루미늄 마운트에 돌돌 말거나 선끼리 꼬아서 선 정리를 한다. 또한 배터리 연결을 하여 정상적으로 연결되었는지 확인한다. 이 때 역시 FC와 BEC 각각 적색 LED 2개가 모두 들어오면 문제없이 연결된 것이다.

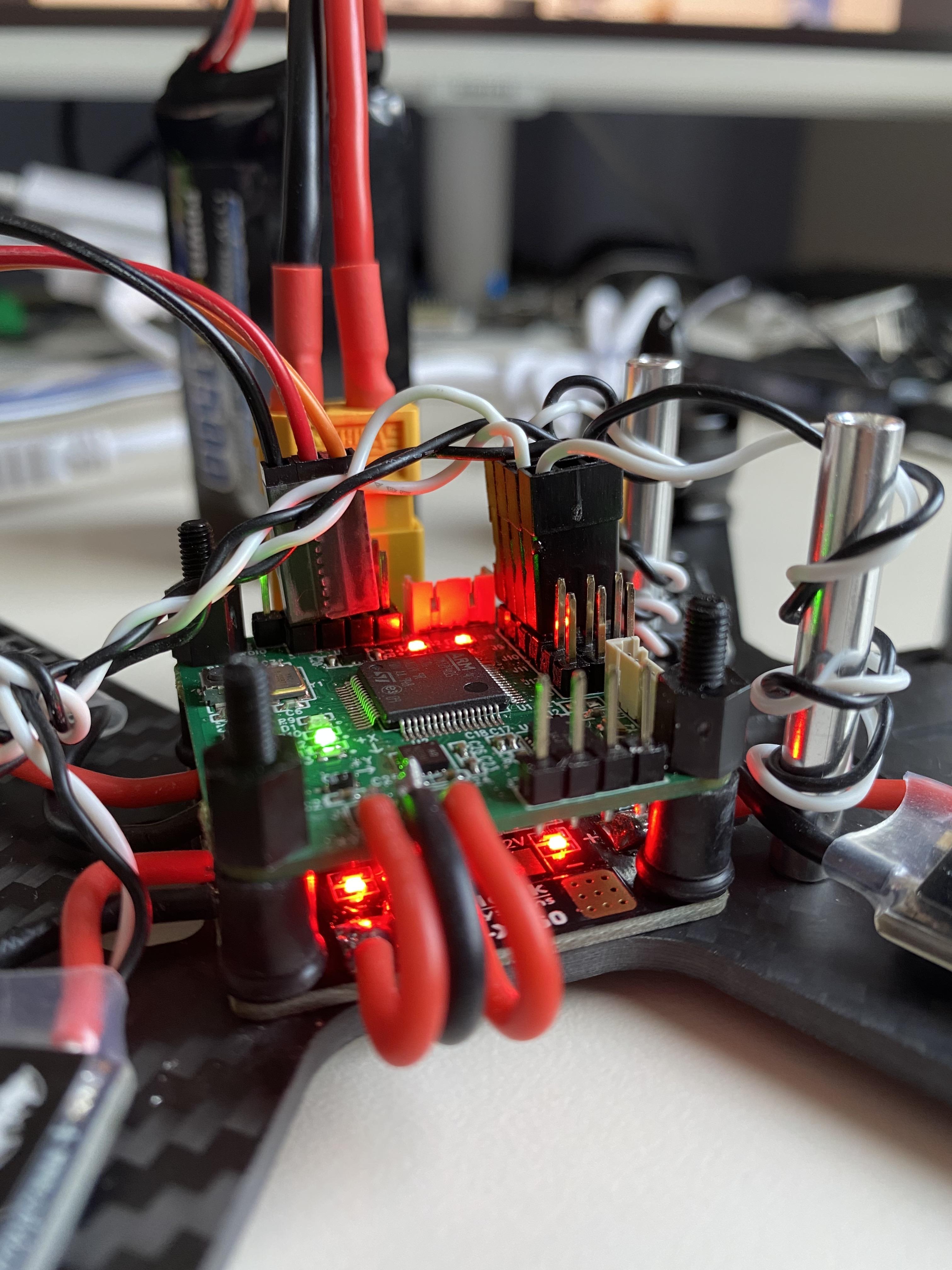
모든 조립이 끝났다! FC에 배터리와 수신기까지 연결한 모습이다.

드론 기체 조립을 마쳤다. 다음 파트부터는 본격적으로 BLDC 모터를 PWM 신호를 이용하여 구동시켜 볼 것이다.